2008-10-20[n年前へ]
■防振エディタ・ソフトウェアのバイナリ 
![]() 昨日作った「加速度P(I)D制御の防振エディタ」で作った防振エディタのバイナリを/misc/stabilizedEditorに置いておきます。いつものように、アイデア一発・作成20分という大雑把な作りなので、できることはテキストファイルの編集と、Open・Saveだけです。
昨日作った「加速度P(I)D制御の防振エディタ」で作った防振エディタのバイナリを/misc/stabilizedEditorに置いておきます。いつものように、アイデア一発・作成20分という大雑把な作りなので、できることはテキストファイルの編集と、Open・Saveだけです。
で、早速「昨夜、こんなソフト作ってみたんだけど」と前置きしながら一発芸ソフトを披露したところ、「プルプル震えて不安定ですね」「全然、綺麗に制御できてないですね」「大体、(位置値でなく)加速度値を使っているのにPD制御って、変じゃないすか?」「もう少し制御工学を勉強した方がいいんじゃないでしょうか?」と実に真っ当な技術論で喝破されていまいました。
そして、それどころか、「それ、老眼促進ソフトですか?」「だから、そんなにフォントが大きいんですか?」とまで言われたてしまったわけです。・・・確かにそうかもしれないなぁと思いながら、誰かが、iPhoneとかで防振エディタ・ブラウザ・画面表示ソフトウェアが作ってくれたらいいのにな、とも思ったのです。
2008-10-27[n年前へ]
■「電車の吊り手」のヒミツ
 いつ頃からだったか覚えていませんが、「電車の吊り手」の構造が昔とは変わったように思います。「電車の吊り手」が以前とは、90度違う方向にぶらさがっているような気がします。以前は、吊り手をぶらさがる金属棒と吊り手が同じ向きを向いていたような気がするのですが、いつの頃からか吊り手をぶらさがる金属棒と吊り手が直行するようになりました。
いつ頃からだったか覚えていませんが、「電車の吊り手」の構造が昔とは変わったように思います。「電車の吊り手」が以前とは、90度違う方向にぶらさがっているような気がします。以前は、吊り手をぶらさがる金属棒と吊り手が同じ向きを向いていたような気がするのですが、いつの頃からか吊り手をぶらさがる金属棒と吊り手が直行するようになりました。
 鉄道が大好きのテツちゃん、血液中には鉄分が流れまくり・・・というわけではないのですが、この列車の「吊り手」の方向変化にはとても興味を惹かれます。吊り手のベルト部分を剛体に変え、吊り手の(乗客が)掴む部分の方向を90度変えるという変更は、一見すると小さい変更のようでいて、実はとても大きな変更・効果が生じているように思えます。
鉄道が大好きのテツちゃん、血液中には鉄分が流れまくり・・・というわけではないのですが、この列車の「吊り手」の方向変化にはとても興味を惹かれます。吊り手のベルト部分を剛体に変え、吊り手の(乗客が)掴む部分の方向を90度変えるという変更は、一見すると小さい変更のようでいて、実はとても大きな変更・効果が生じているように思えます。
というわけで、まずは吊り手の写真を撮りました(怪しい人ですね)。話の先は、吊り手と乗客の振動解析をし、さらには乗客がどのように意識すれば一番揺れないで済むのかを考えてみようと思います。


2008-10-28[n年前へ]
■続 「電車の吊り手」のヒミツ
「電車の吊り手」のヒミツ の続きです。
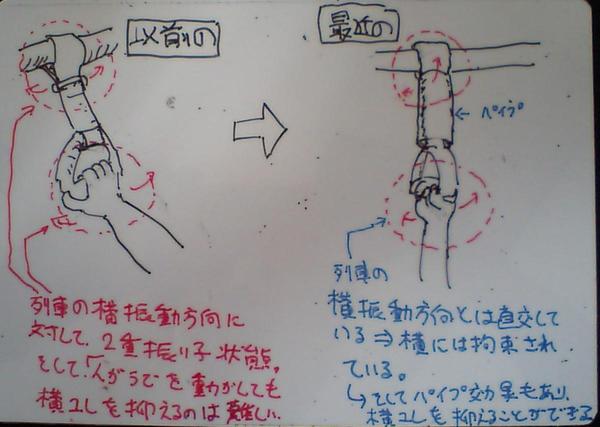
「電車の吊り手」の構造が以前とは、、90度違う方向にぶらさがるように変わっていることに気づきました。そんな吊り手を見ながら、その効果をラクガキをしつつ考えてみたのが、下図になります。
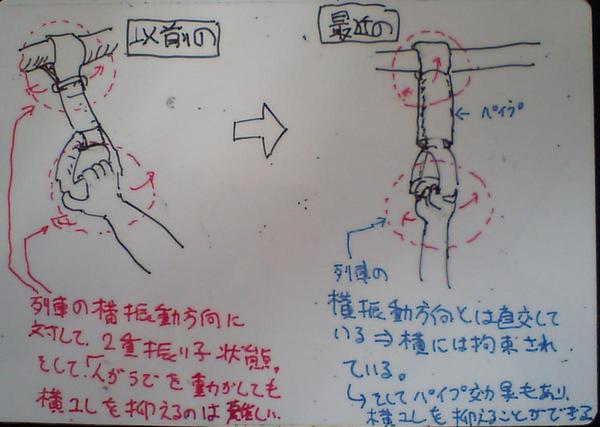
イラストにして見ると、以前の吊り手が「列車の横揺れ方向に対して、2重振り子状態」になっていることがわかります。また、吊り手の支持部と、吊り手の持ち手部が、いずれも列車進行方向に向いているために、横揺れをなかなか抑えることができないように(自分の経験から)思われます。乗客が腕を動かして揺れを抑えようとしても、吊り手に2カ所関節があるので、揺れを抑えるのは難しいように思えます。
しかし、最近の吊り手は(図のように)以前のものとは違うことがわかります。吊り手の持ち手部分が列車の横振動方向とは直行し、(さらに、吊り手のベルト部分がパイプに包まれていることもあり)列車の横揺れに対し、その揺れを抑えることが容易になったように思えます。
ここで、興味深いことは、吊り手のベルトをパイプで囲ったことの効果は別として、吊り手の持ち手部分の方向を90度変えたことで、「列車進行方向揺れ」には弱くなった・揺れやすくなったということです。つまり、列車が走るとき「ほとんどの時間は横揺れを感じる時間で、進行方向の揺れを感じるのは駅に発車・到着する時くらいなので、横揺れ抑制効果を重要視しよう」という判断をしたのでしょう。そういうメリット・デメリットを秤に乗せて行われる選択・技術改良・コスト変更にとても興味を惹かれます。
列車には、吊り手がたくさんぶら下がっています。そんな、吊り手と同じように、たくさんの吊り手が変化したように、そんな技術改良・コスト変更などは、きっとたくさんあると思います。そんなものを町中で見かけると、なぜか楽しく感じたりします。
2008-12-05[n年前へ]
■受動歩行メカのネガティブ・フィードバック構造
 動力を持つわけでもなく、何かのプログラムで動くわけでもなく、ただ坂道に置くだけで、トコトコと歩いていく受動歩行ロボットを見た。機械仕掛けというほど複雑でもなく、けれど驚くほど自然に歩くその物体に、不思議なくらい興味をかき立てられた。
動力を持つわけでもなく、何かのプログラムで動くわけでもなく、ただ坂道に置くだけで、トコトコと歩いていく受動歩行ロボットを見た。機械仕掛けというほど複雑でもなく、けれど驚くほど自然に歩くその物体に、不思議なくらい興味をかき立てられた。
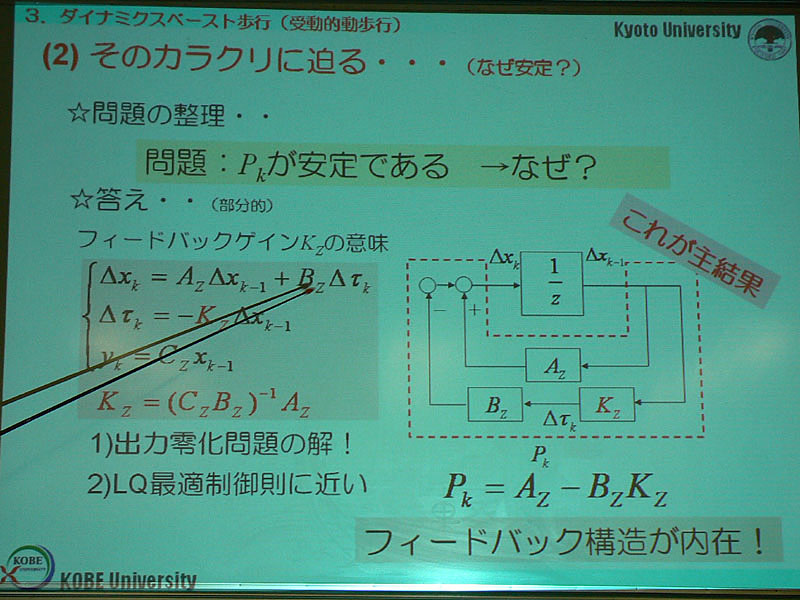
さらに、受動歩行ロボットの歩行動作自体に、ネガティブ・フィードバック構造、つまりは歩行動作が不安定になりかけると、それを安定に直すような仕組みが内包されているという話を聞いた。その話はとても面白くて、メモを必死に取りながら色々なことを考えてしまった。
たとえば、義足を作るときにも、こういったメカニカルに安定歩行を実現するシステム(バランス)が考えて設計がされているのだろうか。私たちの体自体の「バランス」は一体どのようになっているのだろうか。
2009-01-19[n年前へ]
■続々:Simulinkで経済循環モデルを作ってみる
「Simulinkで経済循環モデルを作ってみる」「続:Simulinkで経済循環モデルを作ってみる」というように、教科書を読みながらマクロ経済学のイロハを学ぼうとしています。
というわけで、まずは「スティグリッツ入門経済学 <第3版><第3版>」を読み、これが文庫本だったら持ち歩くのに・・・と思ったり、「早わかり経済学入門―経済学のイロハから最新理論まで、一気にわかる。」を読み、変な例えでの説明が出てこないせいか、個別の項目に関してはとてもわかりやすいなぁ、と感じたりしました。
とはいえ、まだまだ自分できちんと教科書に書いてある経済循環モデルを「教科書通りに動く」ようににすることができません。数え切れないくらい色々な点について勘違いしている感じです。今日はとりあえず、下の図のようなモデルを作ってみたのですが、やはり自分で眺めてみても教科書とは違う変な感じになってしまいました。・・・自習で学ぼうとすると、実に難しいものですね。


