2008-12-05[n年前へ]
■受動歩行メカのネガティブ・フィードバック構造 
 動力を持つわけでもなく、何かのプログラムで動くわけでもなく、ただ坂道に置くだけで、トコトコと歩いていく受動歩行ロボットを見た。機械仕掛けというほど複雑でもなく、けれど驚くほど自然に歩くその物体に、不思議なくらい興味をかき立てられた。
動力を持つわけでもなく、何かのプログラムで動くわけでもなく、ただ坂道に置くだけで、トコトコと歩いていく受動歩行ロボットを見た。機械仕掛けというほど複雑でもなく、けれど驚くほど自然に歩くその物体に、不思議なくらい興味をかき立てられた。
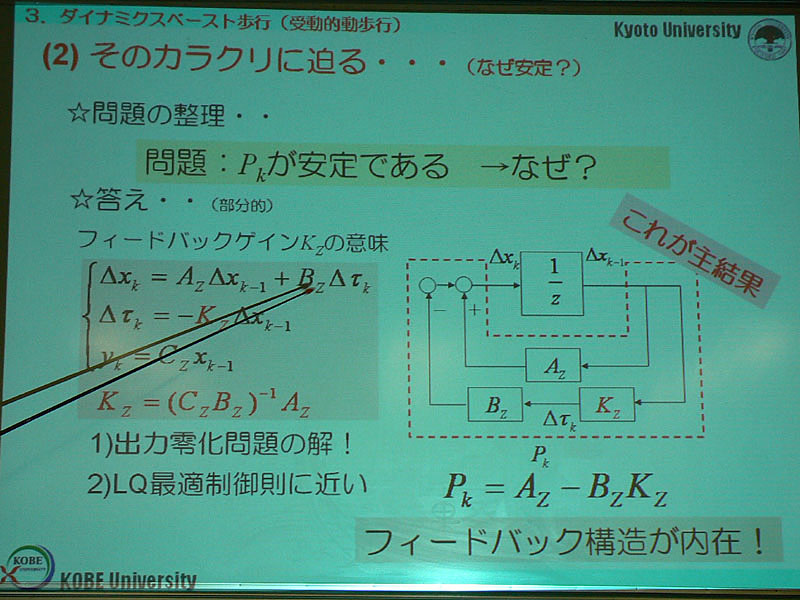
さらに、受動歩行ロボットの歩行動作自体に、ネガティブ・フィードバック構造、つまりは歩行動作が不安定になりかけると、それを安定に直すような仕組みが内包されているという話を聞いた。その話はとても面白くて、メモを必死に取りながら色々なことを考えてしまった。
たとえば、義足を作るときにも、こういったメカニカルに安定歩行を実現するシステム(バランス)が考えて設計がされているのだろうか。私たちの体自体の「バランス」は一体どのようになっているのだろうか。
■Powered
by yagm.net