2017-12-03[n年前へ]
■安顕微鏡レンズを付けたスマホでレコードを撮影して音声化してみよう!? 
 最近のデジカメでレコードを撮影すると「レコード溝がクッキリ見える」という話を読んだ。ということは、”スマホでレコードを撮影すると音声再生するアプリができる時代が来そう”と思って呟くと、「思ったことは一体いつやるの!?今でしょ!今!」と諭された。…確かに、思ったことは、その時にやらないといつまで経っても何もできないような気もしてきます。
最近のデジカメでレコードを撮影すると「レコード溝がクッキリ見える」という話を読んだ。ということは、”スマホでレコードを撮影すると音声再生するアプリができる時代が来そう”と思って呟くと、「思ったことは一体いつやるの!?今でしょ!今!」と諭された。…確かに、思ったことは、その時にやらないといつまで経っても何もできないような気もしてきます。
そこで、ディスクユニオン横浜関内店に行くと、ちょうど「本日だけ!650円以下の全商品が100円!セール」をやっていたので、薬師丸ひろ子「セーラー服と機関銃」を買い、300円くらいの安い顕微鏡キットを付けたiPhone 6sでレコード溝を撮影してみました
 撮影手順は、静止画像で何枚も撮るのは面倒だったので、顕微鏡キットを取り付けたiPhone 6sを高速度撮影モードにして、レコードの上を滑らせながらの撮影です。そして、高速撮影動画を位置合わせ合成し、溝の太さをデジタル化することで、左右チャンネルを合成した音声ファイルを作成してみました。
撮影手順は、静止画像で何枚も撮るのは面倒だったので、顕微鏡キットを取り付けたiPhone 6sを高速度撮影モードにして、レコードの上を滑らせながらの撮影です。そして、高速撮影動画を位置合わせ合成し、溝の太さをデジタル化することで、左右チャンネルを合成した音声ファイルを作成してみました。
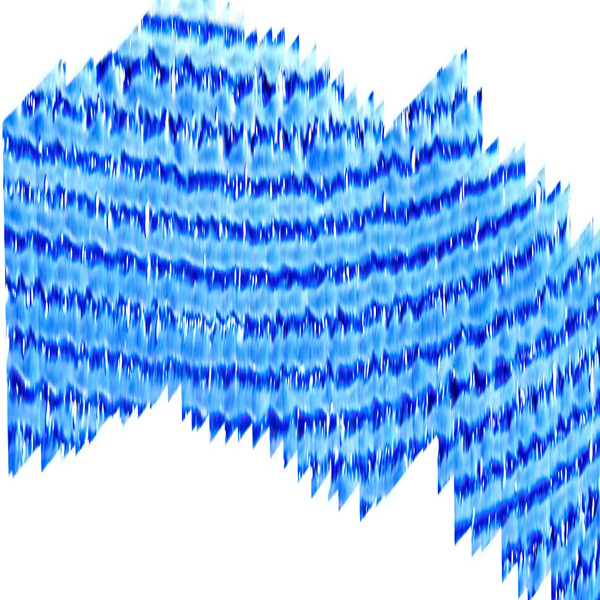
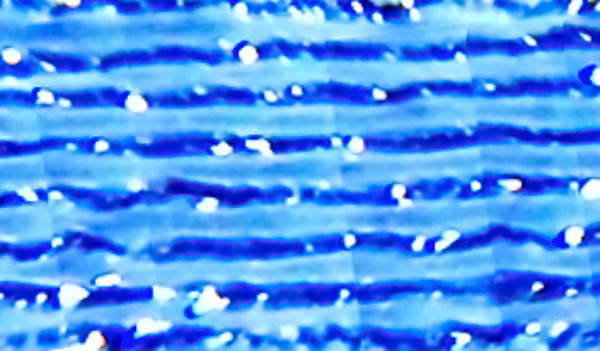
撮影した動画例は、下のようになります。実際には、レコード針が進む方向にとても長い画像ですが、左下の画像例は、それを圧縮したり・一部を拡大してみたものです。


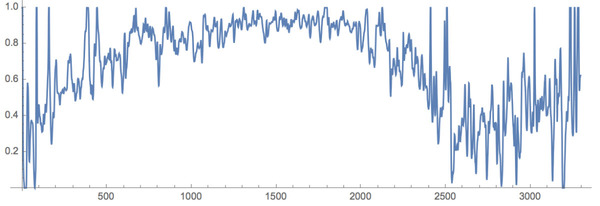
デジタル化したレコード溝の太さを、グラフにしてみたものが、下の画像です。また、音声ファイル(WAV)化してみたものもここに置いておきます。
今回処理してみたのは、とても短い時間分なので、音楽として聞こえるようなものではありません。けれど、普通のスマホ+300円くらいで、アナログレコードの音声デジタル化撮影が(普通に?)できるようになっているのは、何だか少し面白いものです。





■Powered
by yagm.net