2008-05-30[n年前へ]
■(加速度センサ対応)体感・実感バストシミュレータを作る 
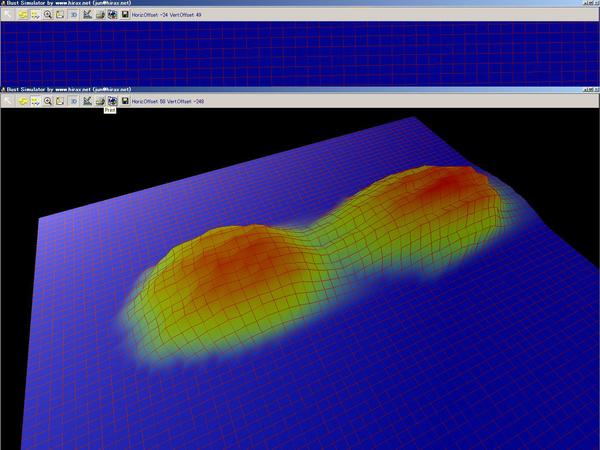
体感・実感バストシミュレータを作ってみました。アプリケーションのウィンドーを揺らしたり、(もしThinkpadユーザなら)PCを揺らしたりすると、その振動に応じた変形を計算・表示するというシミュレータです。下の動画はその(Windows上で動作する)アプリケーションを動かしている例になります。マウスでウィンドーを動かすと、その力(加速度)に応じた複雑な変形が生じたりすることが見て取れると思います。
また、Thinkpadを持ち上げ、傾けてみたり・揺らしてみたりすると、その動きに対応する変形が生じるので、まるでバーチャルリアリティのようにその変形の因果関係を体感できるかもしれません。端的に言ってしまえば、このアプリケーションを動かしつつ胸の前でThinkpadを持って体を動かすと、その動きに応じた変形シミュレーション計算結果を刻々表示(レンダリング)する、なんていう遊びもできるわけです。
不可思議に見える動きでも、案外こんな実験をしているうちに、その因果関係を実感・納得できるかもれいません。それが、「体感バストシミュレータ」だったりすると、ナニな感じは漂いますが、そんなクダらなさがこのサイトの一つの特徴でもあるので、(色々な視点から眺めた下の動画でも)適当に流し見しつつ・楽しんで頂けたら幸いです。
このアプリケーション(バイナリ実行ファイル)はここに置いてあります。計算部はC++で適当・速攻で作り、(皮膚からの表面張力を働く)弾性・塑性的な性質を持つPartcleクラスを多数保持するBodyクラスにより、変形状態が計算される、という具合です。書き飛ばした部分を整理し、C++ Bodyクラスのソースも近々置いてくことにしようと思っています。
2008-06-01[n年前へ]
■(加速度センサ対応)体感・実感バストシミュレータのC++クラスソース
 「(加速度センサ対応)体感・実感バストシミュレータを作る」のC++クラス・ソース(及びバイナリ)を置いておきました。本当に行き当たりばったりに書いたので、とても乱雑で汚く・遅い代物です。なお、使い方はこんな具合になります。
「(加速度センサ対応)体感・実感バストシミュレータを作る」のC++クラス・ソース(及びバイナリ)を置いておきました。本当に行き当たりばったりに書いたので、とても乱雑で汚く・遅い代物です。なお、使い方はこんな具合になります。
Body body;中身は、粒子郡を拘束力で適当に包むと同時に外力を与えているというようになっていて、金子さんの水粒子プログラムの単純版です。
body.move();
float *mesh=body.fMesh;
for(int y=-40;y<=40;y++)
for(int x=-40;x<=40;x++,mesh++)
//SurfacePlot(x, *mesh, y);
// この*meshに高さが入っている



2008-06-06[n年前へ]
■体感・実感バストシミュレータの内側(粒子群)を見る
「GPUを使った物理計算プログラム」と「スクリプト言語」で読んだ日経エレクトロニクスの、「粒子が動いて流体を表現するさまを示した図」が見ていて綺麗だったので、先日作ったプログラム、粒子法を使った(加速度センサ対応)体感・実感バストシミュレータにも表面レンダリングだけでなく粒子レンダリングの機能を付けてみました(バイナリはここに置いておきます)。
アプリケーションを実行させて、「皮膚」=表面層の内側を眺めたさまは下の動画のようになります。
2013-07-19[n年前へ]
■「下向きにかがんだ時のおっぱい変形具合」を暗算計算する方法!?
 おっぱいのヤング率が 0.5〜25×10^3 Pa 程度という数字を使うと、たとえば「下向きにかがんだ時のおっぱい変形具合」も大雑把に見積もることができます。(参考:「10%ゼラチン・ゼリーの柔らかさ」は「おっぱいより、ほんの少し堅いくらい」という必ず役に立つ豆知識!?)
おっぱいのヤング率が 0.5〜25×10^3 Pa 程度という数字を使うと、たとえば「下向きにかがんだ時のおっぱい変形具合」も大雑把に見積もることができます。(参考:「10%ゼラチン・ゼリーの柔らかさ」は「おっぱいより、ほんの少し堅いくらい」という必ず役に立つ豆知識!?)
まずは、おっぱいの形状を10cm四方の立方体として考えてみることにします。脂肪の密度は水より少し軽い程度ですから、このおっぱい立方体の重量は約1kgです。1kg重=9.8Nの力が10cm四方のおっぱいに働くということは、1m^2あたりの応力に直すと、これまた大雑把に見積もるならば、おっぱいを「伸ばす」向きに9.8 N / (0.1 m × 0.1 m) ≒ 1×10^3 Paの力が掛かるということになります。
たとえば、おっぱいのヤング率を 1×10^3 Paとすると、
おっぱいの変形(歪み量)= 1×10^3 Pa/1×10^3 Pa =1ということになります。それは、「おっぱいが下方向に(元の長さを1とすれば)2倍の長さまで伸びる」ということですから、10cm四方のおっぱいは 20cm×7cm×7cm 程度にまで変形する…というわけです。(何だかとてもリアルでしょう?)
 ここで「実に面白い点」は、「地球上で(おっぱいに)働く重力がおっぱいのヤング率とほぼ同じ」という不思議な偶然です。言い換えれば、極めて興味深い点は、地球で生活するおっぱいの変形が数倍程度に収まるような特性になっている…という奇妙な事実です。
ここで「実に面白い点」は、「地球上で(おっぱいに)働く重力がおっぱいのヤング率とほぼ同じ」という不思議な偶然です。言い換えれば、極めて興味深い点は、地球で生活するおっぱいの変形が数倍程度に収まるような特性になっている…という奇妙な事実です。
…しかし、考えてみればその半分は必然です。なぜなら、おっぱいのヤング率が重力に対して小さかったら、誰しも「おっぱいが地面にまで垂れる垂乳根の母状態」になってしまい、ズリズリ…とおっぱいを引きずり歩くような生物が生存することはとても難しそうだからです。
それでは、ヤング率が高い場合=おっぱいが堅く変形しない場合にはどうか、なぜ堅いオッパイではなかったのか…ということについては、識者のご意見を拝聴したいところです。
2014-06-27[n年前へ]
■Salome-Meca で「指で押されたおっぱい変形」を計算してみよう!?
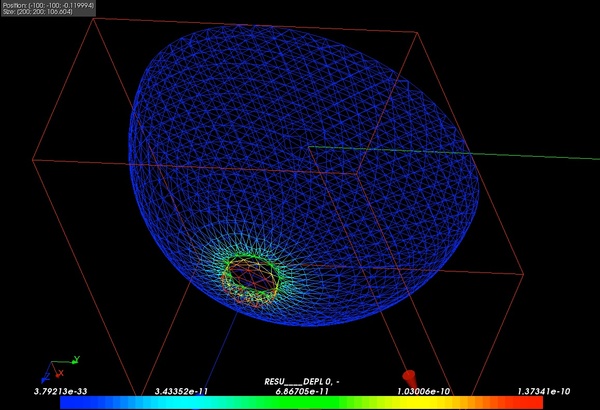
 プリプロセッサソフトウェアのSalome・構造解析ソルバのCode_Aster・ポストプロセッサのParaViewが統合されたSalome-Mecaを使って「指で押されたおっぱい変形」を計算してみました。ヤング率は2×10^4、ポワソン比は0.5として、軽く胸の先を押した時の変形や応力分布などを計算してみる、という具合です。
プリプロセッサソフトウェアのSalome・構造解析ソルバのCode_Aster・ポストプロセッサのParaViewが統合されたSalome-Mecaを使って「指で押されたおっぱい変形」を計算してみました。ヤング率は2×10^4、ポワソン比は0.5として、軽く胸の先を押した時の変形や応力分布などを計算してみる、という具合です。
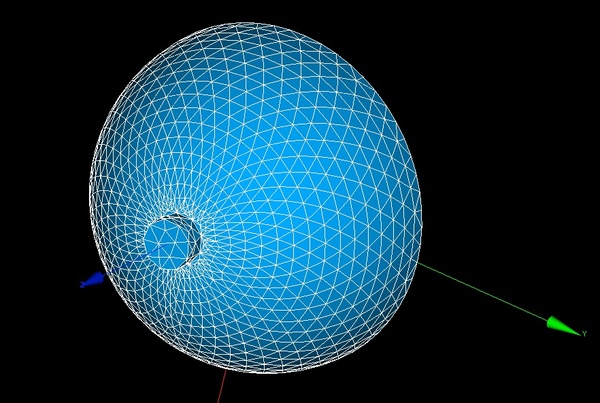
まずは、ヤング率が10の4乗オーダーの半球形状の先に、同じくヤング率10の4乗オーダーという柔らかな円筒形を作ります(参考:「時速60kmの風」は「アンダー85cm Cカップを1.3mm押し込む感触」で「ウィダーゼリーの重さ」とほぼ同じ!?という法則)。そして、その先っぽを押してみると、応力・歪みは先端部分に集中する…という当たり前の結果になりました。当たり前ではありますが、なかなか実験したり・解析したりすることができないシチュエーションでもあります。
…というわけで、今日はこんな解析をしてみました。