2008-07-14[n年前へ]
■「メディアの特性」と「制御工学の安定性」 
渋谷で飲んだ帰り、道玄坂の坂を駅に向かって下っていくと、隣を歩く人が「あんな風に名づけ、メディアが取り上げるから、そんなものが増えてしまうんですよね」と言った。メディアに関わるその人が、そんなことを言った。その人の視線の先を眺めると、渋谷駅前のビルの上に「モンスターペアレント」という広告が大きく光っていた。
光る広告を見た後に、「1,2ヵ月前のログに、検索語として、漂白剤や洗浄剤の商品名が多かったこと」をなぜか連想した。その検索語を示す何桁にもおよぶ検索ログを見て、「メディアが名づけ・報道すること」や「検索サービスがユーザに与えるもの」について、考えさせられたことを思い出した。
 その言葉を聞き道玄坂を下りつつ、「制御工学のフィードバック」を考えた。「出力(結果)を入力(原因)側に戻す」ことを意味するフィードバックにおいて、「出力の増加が入力の増加をさらに生む」ような「戻し方」を正のフィードバックという。
その言葉を聞き道玄坂を下りつつ、「制御工学のフィードバック」を考えた。「出力(結果)を入力(原因)側に戻す」ことを意味するフィードバックにおいて、「出力の増加が入力の増加をさらに生む」ような「戻し方」を正のフィードバックという。
正のフィードバックが働いている場合、(特に系のループ利得が1を越える場合)何らかの破綻が起こるまで出力が増大しつづける。また、この領域では初期値の違いが時間の経過にしたがって無限に引き伸ばされるため、僅かな初期値の違いがシステムの挙動を大きく変える(カオスな振る舞いとなる)場合がある。これは複雑性や多様性を生み出す原動力となりうる。そして、その逆に「出力の増加分を入力を減らす」ように働く、出力(結果)の入力(原因)側への戻し方を「負のフィードバック」と呼ぶ。
負のフィードバックが働く場合は、フィードバック系の増幅率は裸の増幅率より小さな値となる。この増幅率の余裕分の範囲で、出力の増加は増幅率を引き下げるように働き、出力の低下は増幅率を引き上げるように働くので、出力の変動を抑えることができる。(不安定性を消し、安定にすることができる)
電子機器・メカ機器で多く使われるフィードバックシステムは、「負のフィードバック」だ。なぜなら、それにより「システムの安定化」を実現化することができるからである。逆に言えば、そういう風にシステムを作らなければ、安定して機器を動かすことはできない。
その一方、ユーザーインターフェースをつかさどる機器は、「正のフィードバック」として動くものも多い。たとえば、車のハンドルを動かすパワーステアリングなどは、入力の増幅が出力の増幅を生み出す「正のフィードバック」システムだ。少ない力で人の手助けをするシステムを作ろうとするならば、「正のフィードバック」を使うのが自然で人に優しい、というわけである。そういった、ユーザの反応を増幅拡大して見せるポジティブ・フィードバック系が多い。
ユーザの操作・反応がとても重要であり、同時にマスメディアでもあるようなツールを作ろうとするときには、この「フィードバック」特性を意識することは、きっと何かの知見を与える、と思う。「正のフィードバック」と「負のフィードバック」、そして、それらのフィードバック・システムが生み出すシステム、そういったものの挙動をシステムに関わる人々が想像してみることは、きっと何かの役に立つのではないだろうか、と思う。
どちらが良いとか悪いといった単純な二元的な話ではなくて、複雑なシステムの挙動に対して道具が与える影響を考えてみることはきっと無駄にはならないだろう、と思う。
2008-10-19[n年前へ]
■加速度P(I)D制御の防振エディタ
列車や飛行機や、あるいは、船の上といった場所でPCを使う人もいる、と思います。そんな人たちは、とりたてて多くはないのかもしれないけれませんが、きっと、そんな人たちもいると思います。つまり、揺れ動くノートPCの液晶を眺めながら作業をする人たちがいると思うのです。
そんな作業は、目を疲れさせ、きっと視力を悪くします。・・・そこで、ノートPCに搭載されている加速度センサを使って、揺れの成分を取り除くようにWindowを動かすエディタを作ってみた。題して、「加速度P(I)D制御の防振エディタ」です。つまり、その瞬間の加速度=位置の差(Propotional)と、その瞬間の加速度の微分=位置の差の差(Differential)をさらに演算した結果を用いて、エディタのウィンドー位置を防振補正し、「揺れ動く環境の中でも目を疲れさせないエディタ」を作ってみたのです。
そんな「加速度P(I)D制御の防振エディタ」を使っているようすを撮影してみました。それが、上に貼り付けた動画です。画面中央右の「加速度P(I)D制御の防振エディタ」が、その他のWindowsパーツと違って、防振の方向に動いている(動かそうとしている)のがわかるだろう、と思います。
ちなみに、その拡大動画が下に貼り付けたものです。画面右が防振エディタで、画面の左後ろにあるのが普通のエディタになります。
ケータイで撮影した動画ではわかりづらいと思いますが、真面目にやれば効果が結構あるように思えるのです。・・・ということは、あと数年もすると、「加速度P(I)D制御のノートPCの防振表示画面」というものも、ごく当たり前になっているかもしれません。
2008-10-20[n年前へ]
■防振エディタ・ソフトウェアのバイナリ
![]() 昨日作った「加速度P(I)D制御の防振エディタ」で作った防振エディタのバイナリを/misc/stabilizedEditorに置いておきます。いつものように、アイデア一発・作成20分という大雑把な作りなので、できることはテキストファイルの編集と、Open・Saveだけです。
昨日作った「加速度P(I)D制御の防振エディタ」で作った防振エディタのバイナリを/misc/stabilizedEditorに置いておきます。いつものように、アイデア一発・作成20分という大雑把な作りなので、できることはテキストファイルの編集と、Open・Saveだけです。
で、早速「昨夜、こんなソフト作ってみたんだけど」と前置きしながら一発芸ソフトを披露したところ、「プルプル震えて不安定ですね」「全然、綺麗に制御できてないですね」「大体、(位置値でなく)加速度値を使っているのにPD制御って、変じゃないすか?」「もう少し制御工学を勉強した方がいいんじゃないでしょうか?」と実に真っ当な技術論で喝破されていまいました。
そして、それどころか、「それ、老眼促進ソフトですか?」「だから、そんなにフォントが大きいんですか?」とまで言われたてしまったわけです。・・・確かにそうかもしれないなぁと思いながら、誰かが、iPhoneとかで防振エディタ・ブラウザ・画面表示ソフトウェアが作ってくれたらいいのにな、とも思ったのです。
2008-12-05[n年前へ]
■受動歩行メカのネガティブ・フィードバック構造
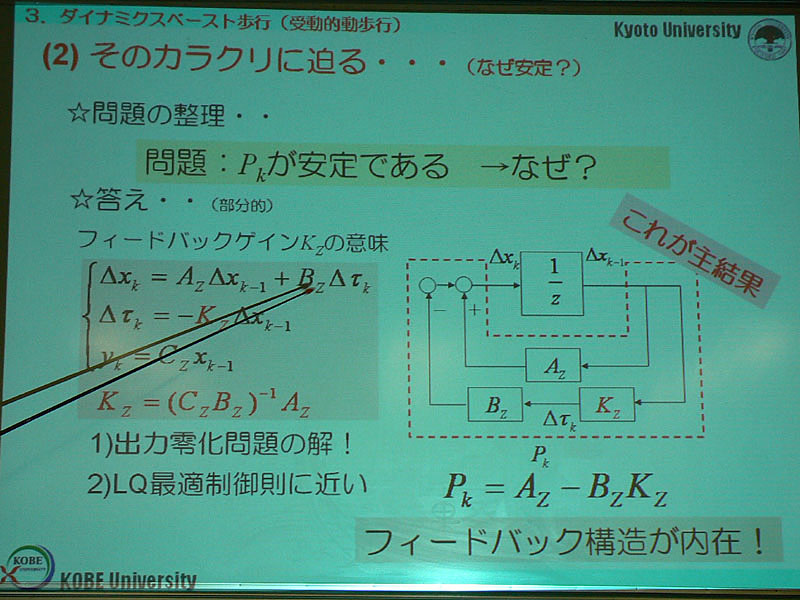 動力を持つわけでもなく、何かのプログラムで動くわけでもなく、ただ坂道に置くだけで、トコトコと歩いていく受動歩行ロボットを見た。機械仕掛けというほど複雑でもなく、けれど驚くほど自然に歩くその物体に、不思議なくらい興味をかき立てられた。
動力を持つわけでもなく、何かのプログラムで動くわけでもなく、ただ坂道に置くだけで、トコトコと歩いていく受動歩行ロボットを見た。機械仕掛けというほど複雑でもなく、けれど驚くほど自然に歩くその物体に、不思議なくらい興味をかき立てられた。
さらに、受動歩行ロボットの歩行動作自体に、ネガティブ・フィードバック構造、つまりは歩行動作が不安定になりかけると、それを安定に直すような仕組みが内包されているという話を聞いた。その話はとても面白くて、メモを必死に取りながら色々なことを考えてしまった。
たとえば、義足を作るときにも、こういったメカニカルに安定歩行を実現するシステム(バランス)が考えて設計がされているのだろうか。私たちの体自体の「バランス」は一体どのようになっているのだろうか。
2008-12-30[n年前へ]
■「電気コタツ」から「人間行動」まで「フィードバック」してみよう
寒くなってくると、「モ-レツ科学教室」の「フィードバックしてみよう」を思い出す。越前屋俵太とトンチ博士が電気コタツの中に潜り込み、コタツの中をドライヤーでさらにアッチッチにすると、サーモスタットでコタツのヒーターが止まるようすから「ネガティブ・フィードバック」を説明する。つまり、(目標とする安定状態からの)差分を消す方向に働くフィードバック制御を説明する。
そして、次に、2人でボールを投げ合っているうちにヒートアップし、力一杯ボールを投げつけ合うさまから、「ポジティブ・フィードバック」を説明していく。もちろん、いつも屋外授業がモットーの「モ-レツ科学教室」だから、越前屋俵太は京都の町中の公園に行き、歩く人たちにボールを投げつけ「ネガティブ・フィードバック」を体感する。
ビデオを見ているだけで、「電気コタツの動作」から「人間の行動」まで、「フィードバック」を体感したような気持ちに私までなってくる。
一般的に、ほどよいネガティブ・フィードバックは安定な状態を作り出し、ポジティブ・フィードバックは大きな変動を生み出す。道端でする井戸端会議、ネット上のさまざまなシステム、世界全体を巻き込む経済動向といった、多種多様なものたちに働いている「フィードバック・システム」を眺め、その「設計思想」を考えてみたくなる。