2010-01-19[n年前へ]
■悪用できない技術は偽物である 
 石黒浩の「ロボットとは何か――人の心を映す鏡 (講談社現代新書)
石黒浩の「ロボットとは何か――人の心を映す鏡 (講談社現代新書)
」から。
「悪用できない技術は偽物である」
これが私の持っている一つの基準だ。技術とは世の中を変える可能性があるものである。逆に世の中にまったく影響を与えない技術は、意味のない技術であって、技術とは呼べない。その技術の使い方次第で、悪いこともできれば、よいこともできる。
2010-01-20[n年前へ]
■受動歩行を用いた「歩くモアイ」の作り方
受動歩行による、「歩く(イースター島の)モアイ」の作り方。受動歩行については、「受動歩行メカのネガティブ・フィードバック構造」といった過去記事も参考にすると面白いかもしれません。
2010-02-11[n年前へ]
■組み込み技術者の熱い頭脳戦

今年も組み込み技術者の熱い頭脳戦が全国各地で繰り広げられる。
ETロボコン――正式名称「ETソフトウェアデザインロボットコンテスト」はその名のとおり、組み込みソフトウェアの設計技術を競う競技だ。同一のロボット(走行体)をベースにして、UML(Unified Modeling Language)などで分析・設計したソフトウェアの技術を競い合い、「ロボット走行システムのソフトウェア設計モデル評価」と「ロボット走行性能(タイムレース)」の2つの側面で審査が行われる。
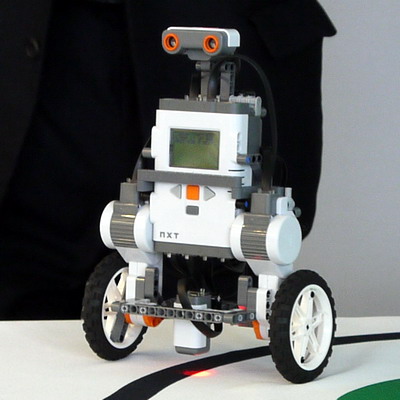
使用される走行体(ロボット)は、(中略)2輪倒立振子ライントレースロボット「LEGO Mindstorms NXT(以下、NXT)」が登場。2010年ではいよいよ(RCXがなくなり)NXTベースのみとなる。
2010-02-18[n年前へ]
■高度ロボット制御システムを構築できるLabVIEW Roboticsモジュール発表
 「日本NI、高度なロボット制御システムも構築できるLabVIEW Roboticsモジュールを発表」
「日本NI、高度なロボット制御システムも構築できるLabVIEW Roboticsモジュールを発表」
日本ナショナルインスツルメンツ株式会社は本日、ロボットや自律制御システムを設計する際の標準的な開発プラットフォームとして使用できる「LabVIEW Roboticsモジュール」をNIのグラフィカルシステム設計ソフトウェア製品群に追加することを発表いたします。

オープンなグラフィカルシステム設計プラットフォームであるため、LabVIEW RoboticsモジュールはC/C++や.m file、VHDLなどの開発言語からコードをインポートしたり、内蔵されているドライバを使ったりして様々なセンサとも通信できます。その一例として、LIDARやIR、ソナー、GPSデバイスなどが挙げられます。そのため、エンジニアや研究者は、開発時間を短縮することができるだけでなく、独自のアルゴリズムやインテリジェンスをロボットに追加することに集中することもできます。
2010-03-08[n年前へ]
■実機動作の前にモデル(シミュレーション)検証を必須としたい

委員長総評(内容は不正確です)ROBO-ONE on PCは、プロトタイピング検証と、実機検証の片方づつ、もしくは両方で競う、とても面白そうな大会だ。しかも、これからは、実機動作の前にモデル(シミュレーション)検証を必須としたい、という総評がとても興味深い。
* MatLab、LabViewを使った検証をできるだけやって欲しい。実機部門での受賞要件に含めようかと思っている。(うまく制御できていても賞を渡さない等)
 次の紹介文は、ROBO-ONE on PC 4th の「公式サイト」から。
次の紹介文は、ROBO-ONE on PC 4th の「公式サイト」から。
ロボットの姿勢制御技術の向上を目指し"竹馬ロボットの開発" を行います。今大会から"シミュレーション・実機・統合"の3つの部門に分かれました。部門別に採点を行い、それぞれ優勝を決めます。シミュレーション部門のみ、実機部門のみのエントリーも可能です。普段"ロボットを作らない方"や"ロボットしか作らない方"も是非ご参加下さい。統合部門はシミュレーションと実機の結果を比較考察する部門です。必然的にシミュレーションと実機両方を行うことになります。
■Powered
by yagm.net