2005-02-06[n年前へ]
■二機の飛行機雲の交差点 
 河口湖近くで空を見上げると、飛行機雲が十字型に交差している。ただ交差しているだけでなくて、ちょうど交差した点だけ飛行機雲が太くなっている(ように見える)。座標が交差するようなコースで、1機目の通った後は水蒸気量などが違ったのだろうか?それとも、(眺める)奥行き方向にはずれていいるけれど、反射光が重なって明るく見えていたのだろうか?
河口湖近くで空を見上げると、飛行機雲が十字型に交差している。ただ交差しているだけでなくて、ちょうど交差した点だけ飛行機雲が太くなっている(ように見える)。座標が交差するようなコースで、1機目の通った後は水蒸気量などが違ったのだろうか?それとも、(眺める)奥行き方向にはずれていいるけれど、反射光が重なって明るく見えていたのだろうか?
飛行機雲の右手後ろには、夕日を背にした富士山が見えた。
2005-07-26[n年前へ]
■測地系のズレと地震グラグラ
 「日本測地系と世界測地系のズレ」の話を読み、先日の渋谷で揺れの大きい地震に驚き、学生時代に学んだ内容を思い出した。それは、第二次世界大戦前にあった同じような「二つの測地系のズレ」の話である
「日本測地系と世界測地系のズレ」の話を読み、先日の渋谷で揺れの大きい地震に驚き、学生時代に学んだ内容を思い出した。それは、第二次世界大戦前にあった同じような「二つの測地系のズレ」の話である
 第二次世界大戦前、東京を原点とする日本の測地座標系と長春を原点とする旧満州の測地座標系が結合された時にも同様の「二つの測地系のズレ」問題が発生した。これは、東京原点付近の地殻構造が複雑でジオイドが「地球全体に適合する楕円体」に対して傾斜しているからである。(各原点の位置計測精度によるズレによるものでなく)各原点のジオイド形状の違いにより、その問題が生じた。
第二次世界大戦前、東京を原点とする日本の測地座標系と長春を原点とする旧満州の測地座標系が結合された時にも同様の「二つの測地系のズレ」問題が発生した。これは、東京原点付近の地殻構造が複雑でジオイドが「地球全体に適合する楕円体」に対して傾斜しているからである。(各原点の位置計測精度によるズレによるものでなく)各原点のジオイド形状の違いにより、その問題が生じた。
 測地系で用いられる準拠楕円体は、「原点におけるジオイド」に接する「ベッセル楕円体」として定められる。ジオイドとは「重力の等ポテンシャル面のうち平均海面と一致するもの」である。地形形状や地面内部の物質分布などにより、滑らかではあるが決して単純な形状ではない。特に、東京原点付近のような地殻構造が複雑な地域では複雑に凹凸を持つことになる。
測地系で用いられる準拠楕円体は、「原点におけるジオイド」に接する「ベッセル楕円体」として定められる。ジオイドとは「重力の等ポテンシャル面のうち平均海面と一致するもの」である。地形形状や地面内部の物質分布などにより、滑らかではあるが決して単純な形状ではない。特に、東京原点付近のような地殻構造が複雑な地域では複雑に凹凸を持つことになる。
 そのため、(ジオイドが凹凸形状をした)東京を原点とする日本のベッセル楕円体と「地球全体に適合する楕円体」は中心位置が大きくずれたものとなる。それに対して、(大陸内部に位置しジオイドの傾斜量が小さい)長春を原点とするベッセル楕円体と「地球全体に適合する楕円体」のズレは比較的小さい。その結果、東京を原点とする日本測地座標系と長春原点の旧満州測地座標系の間にズレが生じたわけである。
そのため、(ジオイドが凹凸形状をした)東京を原点とする日本のベッセル楕円体と「地球全体に適合する楕円体」は中心位置が大きくずれたものとなる。それに対して、(大陸内部に位置しジオイドの傾斜量が小さい)長春を原点とするベッセル楕円体と「地球全体に適合する楕円体」のズレは比較的小さい。その結果、東京を原点とする日本測地座標系と長春原点の旧満州測地座標系の間にズレが生じたわけである。
最近巷で見かける「日本測地系と世界測地系のズレ」も原因を辿れば、東京原点付近の地殻内部構造に端を発していることになる。つまり、結局のところ、日本で頻発する地震とその原因は同じであるということになる。測地系の位置ズレ問題とプレートの位置ズレ問題(地震)は似たような話、と言うことができるかもしれない。
2006-11-08[n年前へ]
■スペクトル処理で遊ぶためのMathematicaノートブック
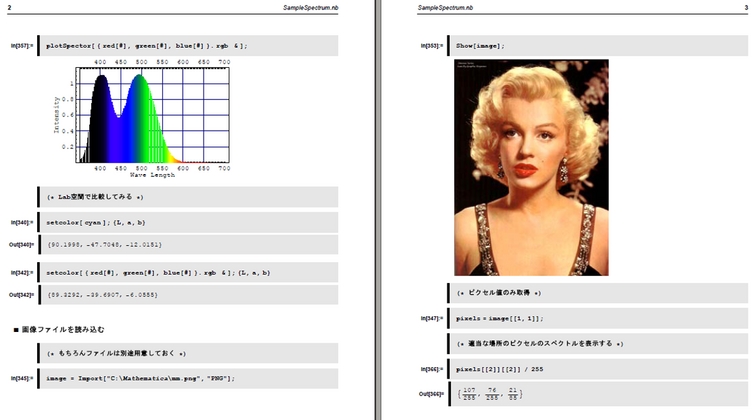 色処理・スペクトル処理で遊ぶためのMathematicaノートブックを作ってみました(Mathematicaノートブック, PDF)。このノートブックはあくまで遊び用ですから、「できること」はとても限られています。けれど、Mathematica初級者が(Mathematicaの使い方を覚えながら)色処理・スペクトル処理を行おうとする時のスタート地点としてならば、少し役に立つかもしれません。例えば、plotSpector red なんてタイプすれば、右の画像中にあるようなカラフルなスペクトル・グラフが表示されたりします(右の例はシアンを表示したものですが)。
色処理・スペクトル処理で遊ぶためのMathematicaノートブックを作ってみました(Mathematicaノートブック, PDF)。このノートブックはあくまで遊び用ですから、「できること」はとても限られています。けれど、Mathematica初級者が(Mathematicaの使い方を覚えながら)色処理・スペクトル処理を行おうとする時のスタート地点としてならば、少し役に立つかもしれません。例えば、plotSpector red なんてタイプすれば、右の画像中にあるようなカラフルなスペクトル・グラフが表示されたりします(右の例はシアンを表示したものですが)。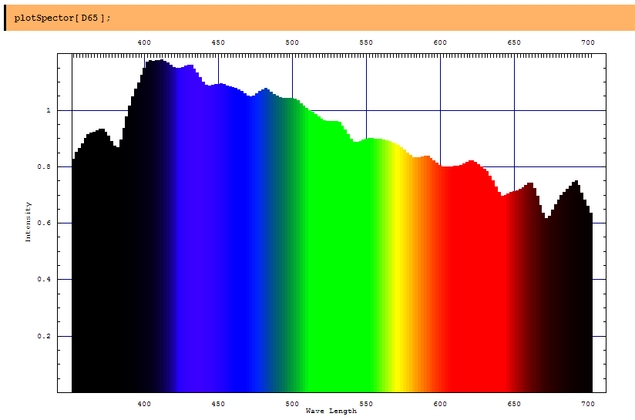 また、rgb = fitSpector cyan, red, green, blue なんてタイプすれば、シアン色を(スペクトル分布を考慮した上で)RGBに分解できます。もちろん、fitSpector hogeColor, cyan, magenda, yellowなら、hogeColorをcyan,magenda,yellowというスペクトルで再構成できるわけです。あるいは、setcolor cyan ; {L, a, b} なんて入力すると、任意のスペクトルをLab色度座標を計算したりできる…という具合です。
また、rgb = fitSpector cyan, red, green, blue なんてタイプすれば、シアン色を(スペクトル分布を考慮した上で)RGBに分解できます。もちろん、fitSpector hogeColor, cyan, magenda, yellowなら、hogeColorをcyan,magenda,yellowというスペクトルで再構成できるわけです。あるいは、setcolor cyan ; {L, a, b} なんて入力すると、任意のスペクトルをLab色度座標を計算したりできる…という具合です。
このノートブックの一つの特徴は、連続する「スペクトル」を(離散的なリスト)でなく「関数」として取り扱うところです。ですから、cyan467.34なんて入力すると、波長467.34nmでのシアンの光強度が出力されたりもします。そして、そんな関数主体の使い方をしてみることで(例えば plotSpector .5 D65# + .5 D50# & という風に)、「純関数(無名関数)」を使うことにも慣れてくるといった副次的な効果もあるかもしれません。
2007-12-29[n年前へ]
■未来の立体ディスプレイが目の前にいる
Head Tracking for Desktop VR Displays using the WiiRemoteを見た。 Wiiリモコンの先端には赤外線カメラがついていて、赤外光を発する点の座標などを検出して、BluetoothでPCに送信することができる。その機能を使い、赤外レーザーダイオードをメガネにとりつけたユーザの顔位置をWiiリモコンで検出し、その位置に合わせた画像を描画するというシステムだ。結構面白い。
前に『「未来の立体ディスプレイ」を作る』で遊んでみたディスプレイも類似のテクニックを使った立体表示法だ。Head Tracking for Desktop VR Displays using the WiiRemoteがディスプレイが固定されていて、そのディスプレイに対して動くユーザ視点を検地するのに対して、Thinkpadの加速度センサを使った立体ディスプレイの方は、固定されているユーザ視点に対して(位置を変える)ディスプレイが動く、という違いである。Wiiリモコンでなく普通のビデオカメラで同様なことをした例であれば、「ViewFrame2-マーカレス顔部検出手法を利用した“ViewFrame”-」などがある。
誰もが携帯電話や、人によっては、PDAを持ち歩いている。そして、それらの機器には加速度センサや小型カメラといった各種センサが搭載されている。つまり、上にリンクしたような「立体表示」が可能な機器を私たちは持ち歩いている、ということだ。だから、未来の立体ディスプレイがもうすぐ手に入るような気がする。
そして、「視差がないのに立体を表示するディスプレイ」の課題を解消するための鍵は、実は「遠山式立体表示法」の効果原理にあるかもしれない、と素人考えをすることがある。遠山式立体表示法の大きな効果は(そういう発表記事を見たことはないのだが)目のピントが合う領域をごく限られた部分だけにすることができるところに実はあったりするのではないか、と思うことがある。だとしたら、傾けたディスプレイ・デバイスで立体表示すると非常に効果的ではないだろうか、と妄想したりするのである。2008-03-29[n年前へ]
■各種計算サービス用サーバの再起動など
プラネタリウム/色計算/天体座標計算/月面表示…などの遊び感覚の各種計算を行うサービス、「Lunar-Triangle Calculator」「Spectrum Color Conversion」「The Lunar Surface Telescope」「The Lunar Timescope "Mobile"」「Mobile Planetarium」「PC Planetarium」用サーバを再起動しました。
また、キーワードの一覧ページの処理先(キーワードブログ)や、個別記事指定時の関連記事自動読み込み、などいくつかのサーバ処理の手順などを変えました。