2007-09-02[n年前へ]
■タフネスとWEBアプリ 
夏の夜の田舎町を、自分の足で走る。歩くようにゆっくり走る。
キャリアとは、轍(わだち)のことだ。轍が繋がり、そこに道が出来る。朝、WEBアプリケーションの管理をcookieに移行して、サーバ側を並列稼働させ始めた。そして、状態管理をRailsのコントローラからJavascript側に移行して、Railsのコントローラ機能を、Javascriptからのアクションに応える形になるように手を入れる。
少し前に、「(相手に)心の中が見える装置」を作ってみました。あるいは、「(相手に)心の中を伝える装置」といえるようなものを作ってみました。ビュー側ならぬクライアント側がコントロールする「単なるイベント駆動」に変えたい部分と、その背後でデータが全て繋がっている部分とを、うまく頭の中で整理できない。
ただ、どんな道にせよ、共通するのは、途中で必ず迷うということだ。どちらに進んで行けば良いのか、わからない時がきっとあるだろう。それでも、高速化のための処理を書く。
そして、ケータイと連携させる部分を書き始めると、Imagenerator用に書いたGmailアクセスWWW::Mechanizeが動かなくなっていることに気づく。最後の最後のsubmitが上手く動かない。しかも、その理由が何だか全然わからない。
けれど、本当に大切なのは、わからないということへのタフネスを身につけることに精力を注ぐことだと私は思う。
それが、最良のキャリア教育であると、私は信じている。
2008-06-03[n年前へ]
■「GPUを使った物理計算プログラム」と「スクリプト言語」
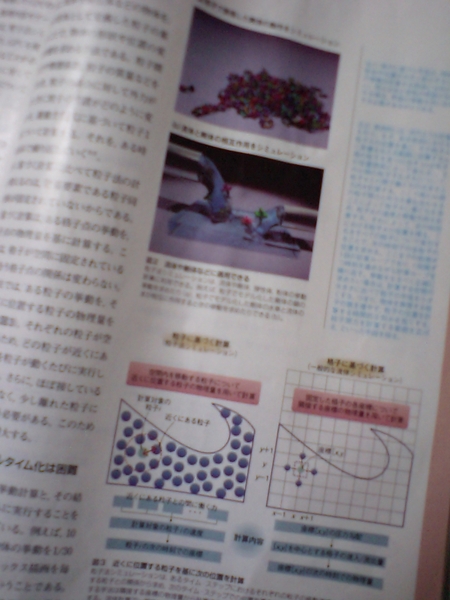
 日経エレクトロニクスを読んでいると、「GPUを使った並列計算で物理シミュレーションを高速化」という記事があった。PC用のグラフィックボードに搭載されている描画処理LSI(GPU)での物理計算の解説記事で、流体などの挙動を粒子群として計算するプロメテック・ソフトウェアの計算ソフトウェアを題材に、GPUで物理計算をする効果や注意点などを解説したものだった。そういえば、つい最近、「NVIDAがGPUベースのレンダリングソフトNVIDIA Gelato Proを無償提供開始」というニュースもあった。
日経エレクトロニクスを読んでいると、「GPUを使った並列計算で物理シミュレーションを高速化」という記事があった。PC用のグラフィックボードに搭載されている描画処理LSI(GPU)での物理計算の解説記事で、流体などの挙動を粒子群として計算するプロメテック・ソフトウェアの計算ソフトウェアを題材に、GPUで物理計算をする効果や注意点などを解説したものだった。そういえば、つい最近、「NVIDAがGPUベースのレンダリングソフトNVIDIA Gelato Proを無償提供開始」というニュースもあった。
 ところで、GPUを使ったシェーダプログラム言語であるGLSL (OpenGL Shading Language)に触れたときに感じた新鮮さは、「GLSLで書かれたプログラムは、実行時にコンパイルされる」ということだった。シェーダのソースコードを書き換えると、そのシェーダを使ったアプリケーション実行すると、その実行時にシェーダプログラムがコンパイルされ動くのである。
ところで、GPUを使ったシェーダプログラム言語であるGLSL (OpenGL Shading Language)に触れたときに感じた新鮮さは、「GLSLで書かれたプログラムは、実行時にコンパイルされる」ということだった。シェーダのソースコードを書き換えると、そのシェーダを使ったアプリケーション実行すると、その実行時にシェーダプログラムがコンパイルされ動くのである。
その感覚はとても新鮮で、「C言語のようでCでない変なスクリプト言語」をいじっているような面白い感覚を味わった。また、自然に並列計算される具合が、何だか非同期で動くアプリケーションをスクリプト言語で書く感じに似ているのだろうか、と感じたりもした。
JavascriptやRubyや…といったスクリプト言語を使うプログラマが、GPUを使ったプログラムをいじってみると、これが結構ハマったり楽しむことができたりするものかもしれない。

2008-07-31[n年前へ]
■「計測・解析ソフトのハック」が実験系技術者の一番のLifeHack…かもしれない。
 「計測・解析ソフトウェア/ハードウェアのハック」が実験系技術者の一番のLifeHack…かもしれない、と思っています。それを逆に言うならば、実験系技術者が費やす多くの時間を、計測・解析ソフトが消費しているということになります。つまり、一番時間を消費している部分の高速化をすることが、全体の高速化に効果的だろう、ということです。
「計測・解析ソフトウェア/ハードウェアのハック」が実験系技術者の一番のLifeHack…かもしれない、と思っています。それを逆に言うならば、実験系技術者が費やす多くの時間を、計測・解析ソフトが消費しているということになります。つまり、一番時間を消費している部分の高速化をすることが、全体の高速化に効果的だろう、ということです。
そんなこんなで、何を今更…という、Perlで「シリアル通信とユーザインターフェース自動制御」のやり方を整理しておくことにしました。なぜかというと、経験的に「計測・解析ソフトウェア/ハードウェアのハック」は、シリアル通信制御とユーザインターフェース自動制御でほとんどの場合対応できることが多いから、です。しかも、計測・解析ソフトウェア/ハードウェアを外注したりすると、時間や費用が無視できないほどかかったりするわけで、そういったシステムを簡単に作ることができるということを知っていると、結構便利であるわけです。
たとえば、RBIOシリーズのような汎用(入)出力ボードは、お小遣い程度の価格で「シリアル通信経由でのハードウェア制御をする」ことが簡単にできます。それは、「計測ハードウェアのハック」がとても簡単にできる、ということです。
そして、Windows上(あるいはWindows上で動くソフトウェア)の作業を”勝手に”プログラミングすることができれば、「計測・解析ソフトウェアのハック」も簡単にすることができます。
というわけで、「シリアル通信とユーザインターフェース自動制御」ができれば、「計測・解析ソフトウェア/ハードウェアのハック」を簡単に実現することができるわけです。
とりあえず、たとえば、Perlで「シリアル通信とユーザインターフェース自動制御」を使うには、Win32::SerialPort と Win32::GuiTest という二つのライブラリが必要です。それらのインストールは、コマンドプロンプトから、
ppm install Win32-SerialPortという風に行うことができます。もっとも、インターネットに直接アクセスすることができない Proxy 内部からであれば、
ppm install http://www.bribes.org/perl/ppm/Win32-GuiTest.ppd
set HTTP_proxy=http://proxy.hoge.com:8080といったような、Proxy対策の環境変数設定をコマンドプロンプトから前もって行っておくことが必要になります。
set HTTP_proxy_user=hogehoge
set HTTP_proxy_pass=hogehoge
あとは、シリアルポート通信ようのConfigファイルを作る、プログラムを書く、ということだけです。たとえば、
!c:\perl\bin\perlといったライブラリを読み込む宣言をした後に、ソフトウェアのユーザインターフェース周りは、
use Win32::SerialPort;
use Win32::GuiTest qw( FindWindowLike GetWindowText SetForegroundWindow MouseMoveAbsPix SendMouse GetWindowRect SendKeys);
MouseMoveAbsPix(320, 160);というような感じで、マウスやボタンやキーボードを自動で動かすことができます。また、ハードウェア周りは、
SendMouse("{LEFTCLICK}");
SendKeys($fileName);
SendKeys("{ENTER}");
my $conf_file="serialport.conf";という感じで*、スイッチやモータを適当にシリアル通信(とRB-IOのようなお手軽I/Fボードで)制御すれば良い、という具合です。午前中に秋葉原に行って部品を買って、午後にスクリプトを2,30行書けば、それで自動計測・制御システムのできあがり、というわけです。
tie *PORT, 'Win32::SerialPort',$conf_file or die; pushSwitch(0);
close PORT or warn "Can't close serialport:COM*";
sub pushSwitch{
my ($portNo) = @_;
my $text=sprintf "PCT%d%d\n",$portNo,1;
print PORT $text;
}
*(なお、ここで使用している"serialport_conf"は、こういったserialport_conf.plで作成します)
2008-11-19[n年前へ]
■Rubyで「シリアル通信スレッドクラス」を作る
 Rubyで「(Rubyシリアル通信ライブラリ(Windows用)TEXCELL を使った)シリアル通信スレッドクラス」を作りました。ソースコードとサンプルはここに置いておきます。”Microsoft Windows VISTAではほとんど見捨てられているような”シリアルポートでの送受信をRubyでスレッドを使って行うクラスです。Queueにデータを突っ込めば「シリアル通信スレッドクラス」から自動的に送信されます。また、受信した文字列が「(指定した改行コードで)一行になるたびに」receiveイベントが呼ばれるので(また、その際にQueueを指定しておけば受信行が自動的にそのQueueに追加されていきます)、読み込みのタイミング・必要な情報がまだ途中までしか読み込まれていない場合などの処理を気にすることなく使いたい、と考えながら作ってみた「シリアル通信スレッドクラス」です。
Rubyで「(Rubyシリアル通信ライブラリ(Windows用)TEXCELL を使った)シリアル通信スレッドクラス」を作りました。ソースコードとサンプルはここに置いておきます。”Microsoft Windows VISTAではほとんど見捨てられているような”シリアルポートでの送受信をRubyでスレッドを使って行うクラスです。Queueにデータを突っ込めば「シリアル通信スレッドクラス」から自動的に送信されます。また、受信した文字列が「(指定した改行コードで)一行になるたびに」receiveイベントが呼ばれるので(また、その際にQueueを指定しておけば受信行が自動的にそのQueueに追加されていきます)、読み込みのタイミング・必要な情報がまだ途中までしか読み込まれていない場合などの処理を気にすることなく使いたい、と考えながら作ってみた「シリアル通信スレッドクラス」です。
たとえば、COM3で受信した内容をコンソールに出力するだけであれば、このようなコードで動くはずです。
require 'comThread'
receiveComThread=ComThread.new({:icomno=>3})
receiveComThread.start({:receive=>true,
:receiveMonitor=>true})
sleep 60
receiveComThread.stop
シリアル通信モニタプログラム(シリアルポート間で送受信されている内容を眺めるプログラム)も、多分10行くらいで書けると思います。チェックせずに書いてしまうと、こんな感じになると思います。
require 'comThread'
q=Queue.new
receiveComThread=ComThread.new({:icomno=>3,:rq=>q})
sendComThread=ComThread.new({:icomno=>4,:sq=>q})
receiveComThread.start({:receive=>true,
:receiveMonitor=>true})
sendComThread.start({:send=>true})
sleep 60
sendComThread.stop
receiveComThread.stop
「計測・解析ソフトウェア/ハードウェアのハック」が実験系技術者の一番のLifeHackかもしれない…と思っています。その思いを逆に言うならば、実験系技術者が費やす多くの時間を、計測・解析処理が消費していると思っているからです。そして、一番時間を消費している部分の高速化をすることが、全体の高速化に効果的だろう、と思っているわけです。というわけで、先週末はこの「Perlでシリアル通信とユーザインターフェース自動制御のやり方を整理しておくことにしました」の部分を「Rubyでシリアル通信とユーザインターフェース自動制御を書いて整理しておくことにしました」ということをしてみたわけです。この「シリアル通信クラス」と「ユーザインターフェース自動制御」があると、結構便利な実験屋さんもいるかもしれません。
そんなこんなで、何を今更…という、Perlで「シリアル通信とユーザインターフェース自動制御」のやり方を整理しておくことにしました。なぜかというと、経験的に(既成機器をを使わざるえないことが多い)「計測・解析ソフトウェア/ハードウェアのハック」は、シリアル通信制御とユーザインターフェース自動制御でほとんどの場合対応できる、からです。
2008-11-27[n年前へ]
■ビル・アトキンソンの円描画の高速化
 以前、Andy Heartzfeldの「Revolution in The Valley
以前、Andy Heartzfeldの「Revolution in The Valley
」を読んだ。apple Macintoshが生まれる前後の物語であるこの本を読むのにはとても時間がかかった。それを言い換えれば、とても長い時間楽しめた、ということだ。
たとえば、こんな一節がある。この数行で書かれていることが、どのように使われて、どのように効果を上げたのかを考えながら読んでいかなければならない。つまり、楽しいギミックがたくさん詰まっていて、そんなパズルを解き、読み進めるのに時間がかかるのである。もちろん、それはとても楽しいひとときだ。
「連続した奇数の合計は、常に次の完全平方になる」という事実を使い、Bill AtkinsonはQuick Drawの円描画を早くした。さて、ここで問題です。Bill AtkinsonはQuick Drawは円描画のためにどのようなコードを書いて、どのくらいの高速化を実現したのでしょうか。
1=1^1, 1+3=2^2, 1+3+5=3^2, 1+3+5+7=4^2
「Revolution in The Valley」