2006-01-27[n年前へ]
■リモートデスクトップを利用したファイル共有 
 「WindowsXPのリモートデスクトップでは、チェックボタンを一つ選択しておくだけで、リモート環境のマイコンピュータにローカルドライブが表示される」という「リモートデスクトップを利用したファイル共有」
「WindowsXPのリモートデスクトップでは、チェックボタンを一つ選択しておくだけで、リモート環境のマイコンピュータにローカルドライブが表示される」という「リモートデスクトップを利用したファイル共有」
Windows XPのリモートデスクトップは「VNCを使ったリモートPC操作」より断然速く、自然に使うことができる。しかも、画面サイズはユーザの手元のPCのサイズで調整されるので、リモート側とローカル側で画面サイズが異なっていても、ほとんど問題がない。ハイスペック機を、小型軽量のタブレットPCからWindows XPのリモートデスクトップを介して使う、というのが結構気持ちよく便利。
2008-05-15[n年前へ]
■PSoC制御の「加熱ホッケーブレード」や「堅さ可変シューズ」
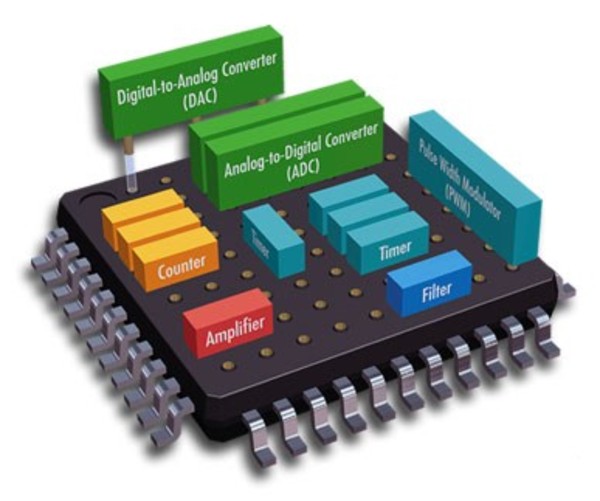
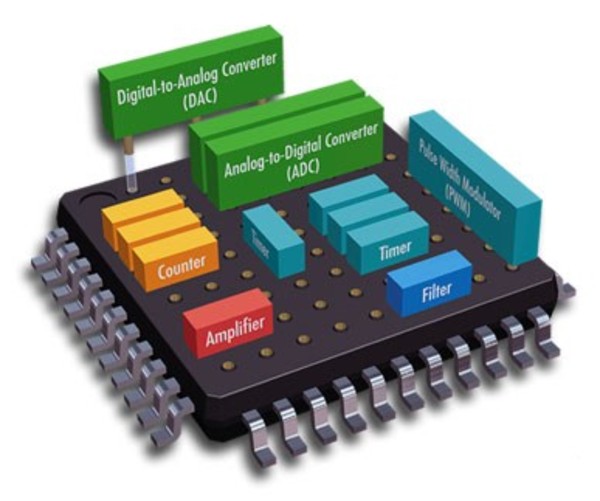 PSoCはCypress社のマイコン・チップで、各種デジタル・アナログ回路が搭載されていて、その組み合わせをユーザがプログラミング(設計)できる、というものだ。FPGAほど高性能ではないけれど、PICより少し賢く便利なアナログ回路が色々詰めあわされている(だから周辺回路を大幅に減らすことができる)、という感じだろうか。アナログ制御・入出力をしたい場合には、とても便利そうなチップである。
PSoCはCypress社のマイコン・チップで、各種デジタル・アナログ回路が搭載されていて、その組み合わせをユーザがプログラミング(設計)できる、というものだ。FPGAほど高性能ではないけれど、PICより少し賢く便利なアナログ回路が色々詰めあわされている(だから周辺回路を大幅に減らすことができる)、という感じだろうか。アナログ制御・入出力をしたい場合には、とても便利そうなチップである。
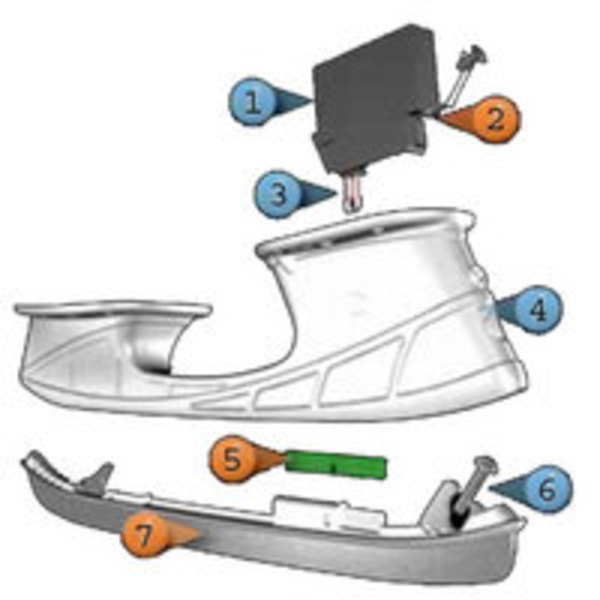
 このPSoCが使われている商品で面白いなぁ、と思うのが「Therma Blade」と「adidas_1, intelligence level 1.1.」だ。
このPSoCが使われている商品で面白いなぁ、と思うのが「Therma Blade」と「adidas_1, intelligence level 1.1.」だ。
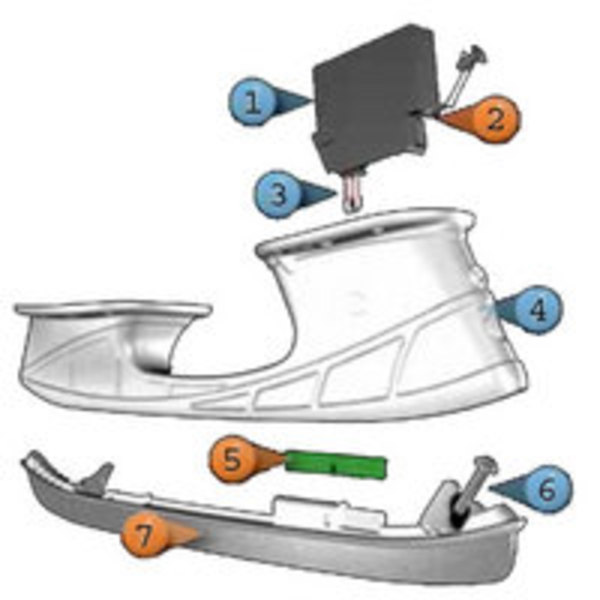
Therma Bladeの方は、アイス・ホッケー・シューズのブレード(氷と接触する金属板部)の氷との摩擦係数を低くし、スピードを高めるために、PSoCでヒーター制御し、ホッケー・シューズ・ブレードの温度を適正に調整したり、ON/OFFしたりするものである。スケートが滑るのは、ブレードと氷の間で氷が解け水になることで、摩擦係数が下がるだ。それならば、「ブレードの温度を上手く制御してやれば、摩擦係数が下がりスピード速く滑ることができる」という狙いの技術である。

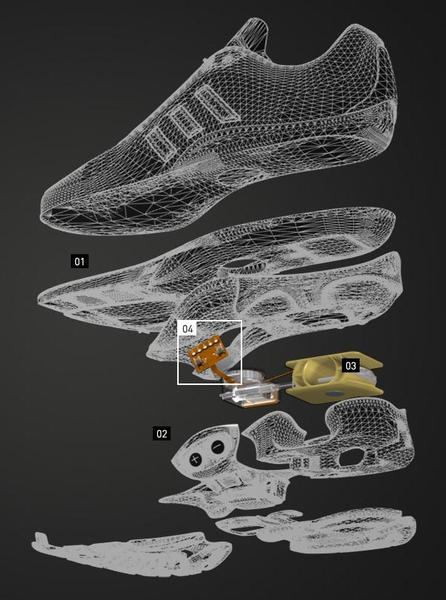
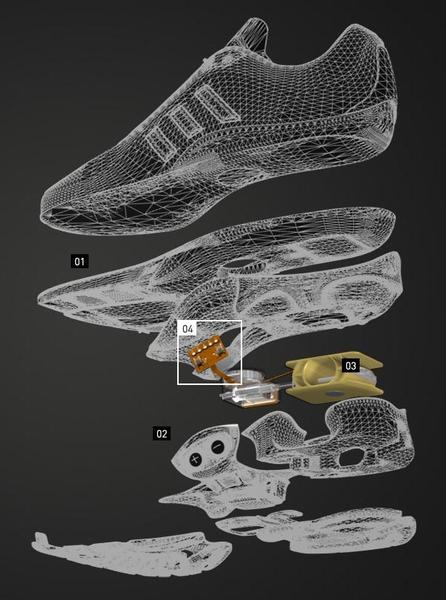 一方、adidas_1, intelligence level 1.1.の方は、PSoCで制御したモータで踵部分にあるエアクッション部を押すことで、エアクッション内圧力=靴の堅さ(衝撃吸収率)を適正に変える、というものだ。電子制御されている車のサスペンション機構(タイヤと車ボディの間で、路面の凹凸・カーブなどがあるときの衝撃を吸収する機構)も多いけれど、それと同じような技術が搭載されたシューズである。
一方、adidas_1, intelligence level 1.1.の方は、PSoCで制御したモータで踵部分にあるエアクッション部を押すことで、エアクッション内圧力=靴の堅さ(衝撃吸収率)を適正に変える、というものだ。電子制御されている車のサスペンション機構(タイヤと車ボディの間で、路面の凹凸・カーブなどがあるときの衝撃を吸収する機構)も多いけれど、それと同じような技術が搭載されたシューズである。
こういったシューズで高機能・高付加価値の流れはどれだけ進んでいくのだろうか。いつか、「トランジスタ技術4月号」で、「フレッシャーズのためのアイスホッケーシューズ制御のABC」といった特集記事が当たり前のように書かれる日が来るのだろうか。



2008-06-08[n年前へ]
■秋葉原という街で
秋葉原に行くようになったのは、三十年くらい前。国際ラジオのような店の前で色んな部品を眺め、役に立ちそうにない汚い部品の数々に、わけもなくワクワクした。何の部品も半田付けもされていないapple][のコンパチ基盤をロビン電子で眺め、武田鉄矢が笑う(けれど、間違っても武田鉄矢が使いそうにはない)「マイコン」を抱えるポスターを眺め、タダの緑茶自販機で喉を潤したりしながら、一日秋葉原で過ごす週末も多かった。
そういえば、マイコンの宣伝ポスターで笑うのは、高倉健や斉藤由紀や……なぜかみんなマイコンを使いそうにない芸能人ばかり、だったような気がする。あれは、一体なぜだったのだろうか。

2008-09-03[n年前へ]
■あなたが思い浮かべる「マイコン」は「何」ですか?
 「コモドールブランドのミニノートPCが登場?」という記事を読んだ。記事の中で紹介されているミニノートPCには興味を惹かれなかったが、初めての自分の「マイコン」がVIC-1001だったので、思わず読んでしまった。
「コモドールブランドのミニノートPCが登場?」という記事を読んだ。記事の中で紹介されているミニノートPCには興味を惹かれなかったが、初めての自分の「マイコン」がVIC-1001だったので、思わず読んでしまった。
あなたが思い浮かべる「マイコン」は「何」だろう?小さなチップのような姿をした「マイクロ」なコンピュータだろうか、それとも「マイ(私の)」コンピュータだろうか?それとも、その二つを兼ね備えた自作コンピュータだろうか……?


2009-04-10[n年前へ]
■ハード/ソフトの量実装を兼ね備えたオンラインコーヒーメーカー「萌香たん」
オンラインコーヒーメーカー「萌香たん」とはじめるドキドキ☆コーヒーブレイク

オンラインコーヒーメーカー「萌香(もか)」は、コーヒーのドリップ開始と完了時に、社内のIRC及びtwitterでコーヒーの抽出状況を教えてくれる機能を持った次世代コーヒーメーカーです。ドリップ完了時には抽出時間などに応じて一言メッセージも付け加えるようにしました。
そこで、コーヒーメーカーのドリップ終了時の「自動電源OFF機能」に着目しました。パイロットランプの点状状況を光センサ(CdS光導電セル)で検出し、マイコン(今回はAVR-ATmega88を使用)を用いてA/D変換を行っあと、その値をUSBを経由してPCに送り、検出状況を制御用プログラムで判別してIRCやtwitterへの各種投稿処理を行います。パイロットランプが消灯→点灯で「ドリップ開始」、点灯→消灯で「ドリップ終了」と言った具合です。抽出量などは点灯時間を計測することで把握できます。
